{kind=link}
{kind=link}
{kind=link}
{kind=link}
Zalaegerszeg, Hungary, was the setting for an unprecedented test this year, with commercially available cars retrofitted with special navigation and self-driving technologies, connected to an experimental, low-latency 5G network, proving that they were capable of driving and parking in real-life traffic situations.
The demonstration took place during the opening ceremony of the ZalaZone Autonomous Vehicle Proving Ground. A professional team of academic and industrial key players – Automotive Proving Ground (APZ), Budapest University of Technology and Economics (BME), Ericsson Hungary, iMAR Navigation, Magyar Telekom, and T-Systems Hungary – carried out 5G based self-driving tests during the ceremony.
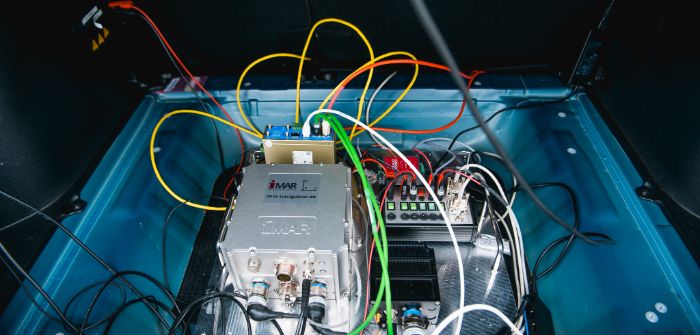
Two iMAR cars (capable of autonomous driving up to SAE Level 4), powered by their ultra-precise positioning (INS/GNSS) and self-guiding technology, traveled at a speed of 60km/h (37mph) following each other at short distances, then performed an overtaking maneuver before stopping at the end of the lane. The next car, the VUT (vehicle under test), continuously monitored and reacted fully autonomously to the movement of the leading car (the TSV, or traffic simulation vehicle).
The vehicle control accessed the position data of the vehicles in real time – 500 times per second – in centimeter-level accuracy, placing it on a high-resolution map and making decisions based on the information.
Several satellite positioning systems (GPS, Galileo, GLONASS, BeiDou) were used simultaneously during the test, supplemented with the data of an inertial measurement system consisting of gyroscopes and accelerometers, ensuring not only extreme accuracy, but also significant error tolerance. This meant that the vehicle’s exact position was always known.
The essence of the navigation is to distribute this highly updated precise position data with sufficient speed among all the vehicles and infrastructure elements participating in the traffic scenario. During the demo, the actual transmission delay reached was 7ms, enabling position data with update rates of up to 100 times per second to be shared between the cars.
The cars were connected to the cellular network via Ericsson’s 5G modem. The experimental 5G network was available via Telekom’s telecommunication tower, equipped with 5G antennas and a mobile-core network solution from Ericsson.
Edge computing technology provided the platform for control functions: devices that are part of the mobile network ensured the computing capacity required for network-connected systems and enable the extreme low latency. T-Systems provided the uplink, broadband optical connectivity and internet exit, as well as the physical infrastructure. Telekom’s commercial 4G+ coverage was available as a backup.
Next, the solutions of another automotive workshop (BME) were presented, partly utilizing the same technologies, but combining and further developing them. Position data was supplemented by sensors monitoring the car’s surroundings, and information fed from a virtual space influenced the vehicle’s behavior.
While the vehicle operates autonomously, it moves in the same way as in a simulation, but its environment may differ from the real test track. In the virtual space, objects (pedestrians or vehicles) have the same impact on the vehicle’s operation as those perceived by their own sensors. All objects are linked to each other through 5G, providing real-time responses: everything happens at exactly the same time in the real and virtual space.
With this solution, the development of self-guiding systems can be faster, safer and more cost-effective, since a system is tested in the real environment only after the individual functions are already working properly in the simulation.
This extensive collaboration between academic and industry stakeholders has shown the benefits of a low-latency cellular network and how it can be utilized to monitor and control self-driving cars. The cooperation may continue, with plans to show how commercial 5G networks could support our journeys not just on the test field, but also on the roads.